Jupyter Snippet CB2nd 07_gps
Jupyter Snippet CB2nd 07_gps
14.7. Creating a route planner for a road network
import io
import zipfile
import requests
import networkx as nx
import numpy as np
import pandas as pd
import json
import smopy
import matplotlib.pyplot as plt
%matplotlib inline
url = ('https://github.com/ipython-books/'
'cookbook-2nd-data/blob/master/'
'road.zip?raw=true')
r = io.BytesIO(requests.get(url).content)
zipfile.ZipFile(r).extractall('data')
g = nx.read_shp('data/tl_2013_06_prisecroads.shp')
sgs = list(nx.connected_component_subgraphs(
g.to_undirected()))
i = np.argmax([len(sg) for sg in sgs])
sg = sgs[i]
len(sg)
464
pos0 = (36.6026, -121.9026)
pos1 = (34.0569, -118.2427)
def get_path(n0, n1):
"""If n0 and n1 are connected nodes in the graph,
this function returns an array of point
coordinates along the road linking these two
nodes."""
return np.array(json.loads(sg[n0][n1]['Json'])
['coordinates'])
# from https://stackoverflow.com/a/8859667/1595060
EARTH_R = 6372.8
def geocalc(lat0, lon0, lat1, lon1):
"""Return the distance (in km) between two points
in geographical coordinates."""
lat0 = np.radians(lat0)
lon0 = np.radians(lon0)
lat1 = np.radians(lat1)
lon1 = np.radians(lon1)
dlon = lon0 - lon1
y = np.sqrt((np.cos(lat1) * np.sin(dlon)) ** 2 +
(np.cos(lat0) * np.sin(lat1) - np.sin(lat0) *
np.cos(lat1) * np.cos(dlon)) ** 2)
x = np.sin(lat0) * np.sin(lat1) + \
np.cos(lat0) * np.cos(lat1) * np.cos(dlon)
c = np.arctan2(y, x)
return EARTH_R * c
def get_path_length(path):
return np.sum(geocalc(path[1:, 1], path[1:, 0],
path[:-1, 1], path[:-1, 0]))
# Compute the length of the road segments.
for n0, n1 in sg.edges:
path = get_path(n0, n1)
distance = get_path_length(path)
sg.edges[n0, n1]['distance'] = distance
nodes = np.array(sg.nodes())
# Get the closest nodes in the graph.
pos0_i = np.argmin(
np.sum((nodes[:, ::-1] - pos0)**2, axis=1))
pos1_i = np.argmin(
np.sum((nodes[:, ::-1] - pos1)**2, axis=1))
# Compute the shortest path.
path = nx.shortest_path(
sg,
source=tuple(nodes[pos0_i]),
target=tuple(nodes[pos1_i]),
weight='distance')
len(path)
19
roads = pd.DataFrame(
[sg.edges[path[i], path[i + 1]]
for i in range(len(path) - 1)],
columns=['FULLNAME', 'MTFCC',
'RTTYP', 'distance'])
roads
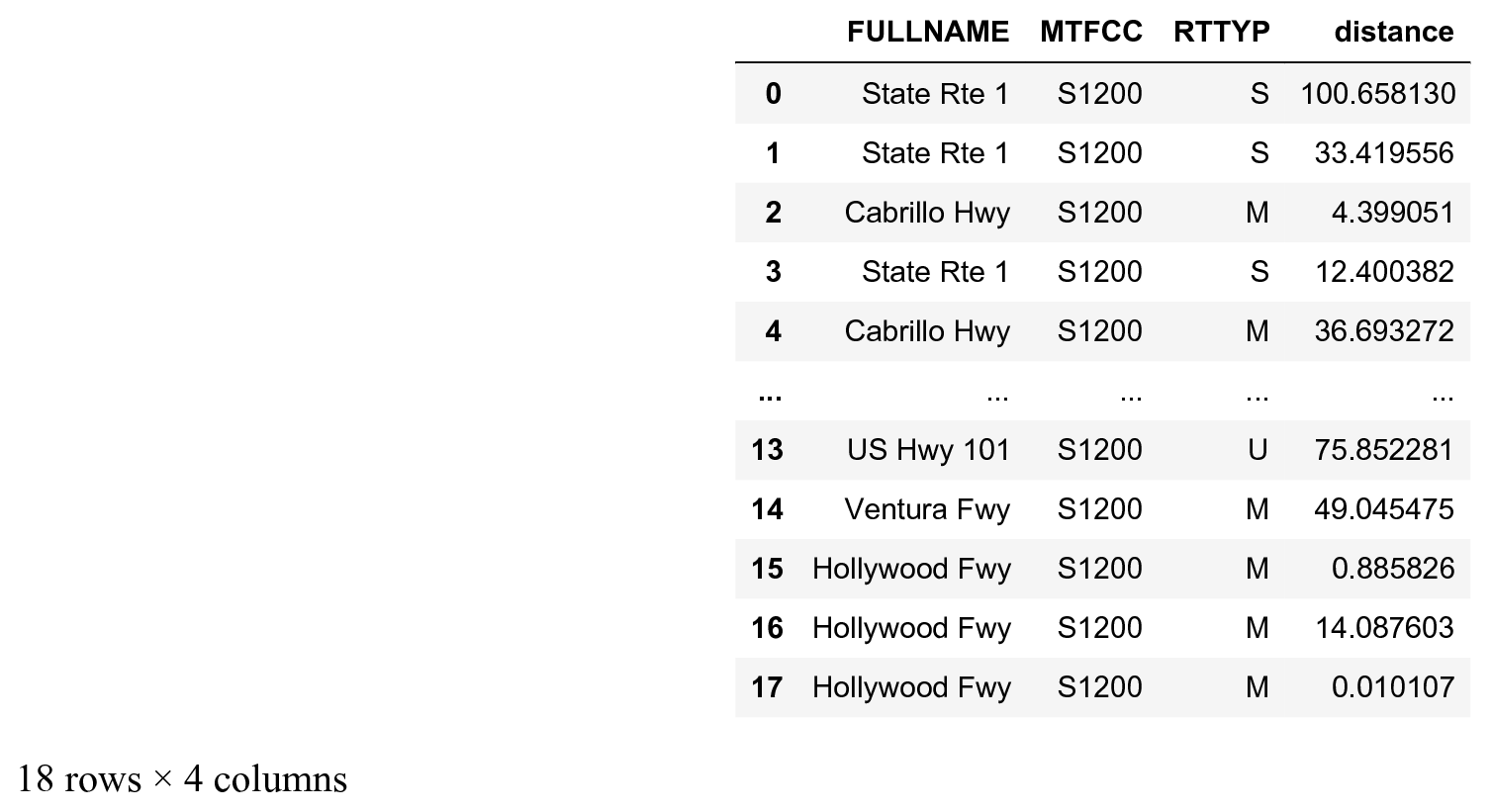
roads['distance'].sum()
508.664
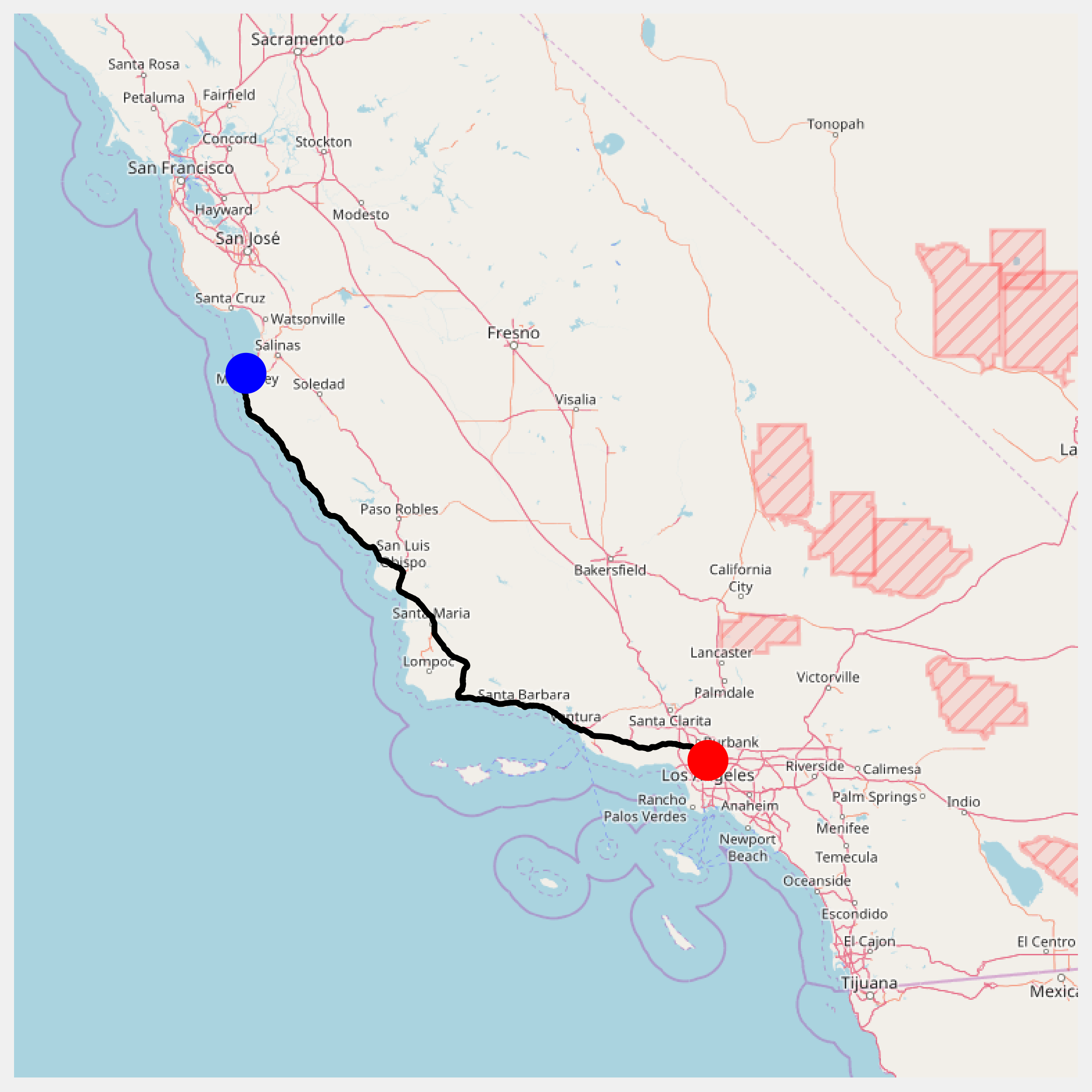
m = smopy.Map(pos0, pos1, z=7, margin=.1)
def get_full_path(path):
"""Return the positions along a path."""
p_list = []
curp = None
for i in range(len(path) - 1):
p = get_path(path[i], path[i + 1])
if curp is None:
curp = p
if (np.sum((p[0] - curp) ** 2) >
np.sum((p[-1] - curp) ** 2)):
p = p[::-1, :]
p_list.append(p)
curp = p[-1]
return np.vstack(p_list)
linepath = get_full_path(path)
x, y = m.to_pixels(linepath[:, 1], linepath[:, 0])
ax = m.show_mpl(figsize=(8, 8))
# Plot the itinerary.
ax.plot(x, y, '-k', lw=3)
# Mark our two positions.
ax.plot(x[0], y[0], 'ob', ms=20)
ax.plot(x[-1], y[-1], 'or', ms=20)